MCP110/200 AA1829R Release Notes
Hardware Requirements, Software Dependencies
This document covers a firmware release that supports MCN CA90-J9937-10 and higher and is composed of the following software:
- PAPI 200.12.50
- VIOP: 200.18.01
Upgrade Procedures
Most upgrades are done over-the-air. Both the firmware and the operating system are available for download on the Omnitracs Customer Portal (on the Support page, click Firmware/OS); refer to the following guides for upgrade procedures:
Compatibility
- MCP110: Windows XPE operating system builds OS129 and OS130
- MCP200: Windows XPE operating system builds OS29 and OS30
New Features and Enhancements
Canadian NMC Move
This release includes updated IP addresses for the Canadian Network Management Cloud (NMCs), which will be moved to the United States by the end of Q3 CY2020. This change does not directly affect customers or functionality.
Updated Carrier PRLs
This release incorporates updated carrier Preferred Roaming Lists (PRLs). These updates will result in network improvement.
CEV Updates
- The syncing of the data for the Camera Health and Camera Status reports has been improved to enhance the resulting diagnoses.
- Non-essential camera status updates have been eliminated via automatic validation based on the persistence of the condition.
- The camera status will be sent at least once a day even when the status of the camera has not changed.
HOS Updates
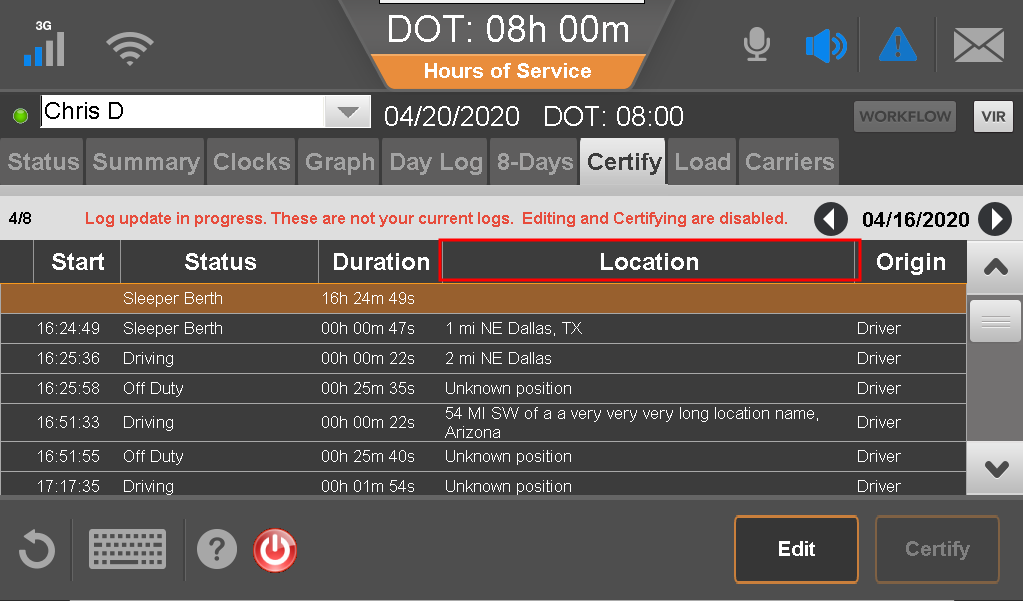
- The Certify tab now includes a Location column that shows the driver where the duty status occurred.
- Drivers can now edit Yard Move and Personal Conveyance statuses as long as those statuses are enabled for the fleet and driver. They can change YM or PC to a non-driving status or change YM to PC and vice versa.
- The system now identifies manual driving versus automatically recorded driving. This change was made in preparation for a future release that will enable users to edit manually recorded driving.
- The active driver can now choose Drive status manually. This allows drivers to record their duty status accurately even if the ELD malfunctions.
- Drivers can now edit manually recorded driving.
- If a driver chooses to continue in Drive when no wheel movement is detected, the log will split the status, indicating when the automatic Drive status ended and the manual Drive status began.
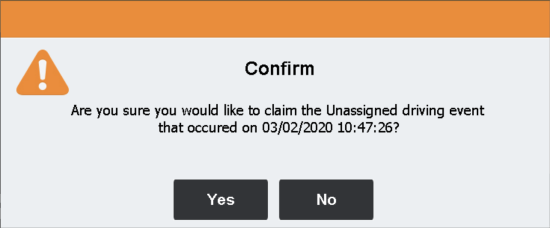
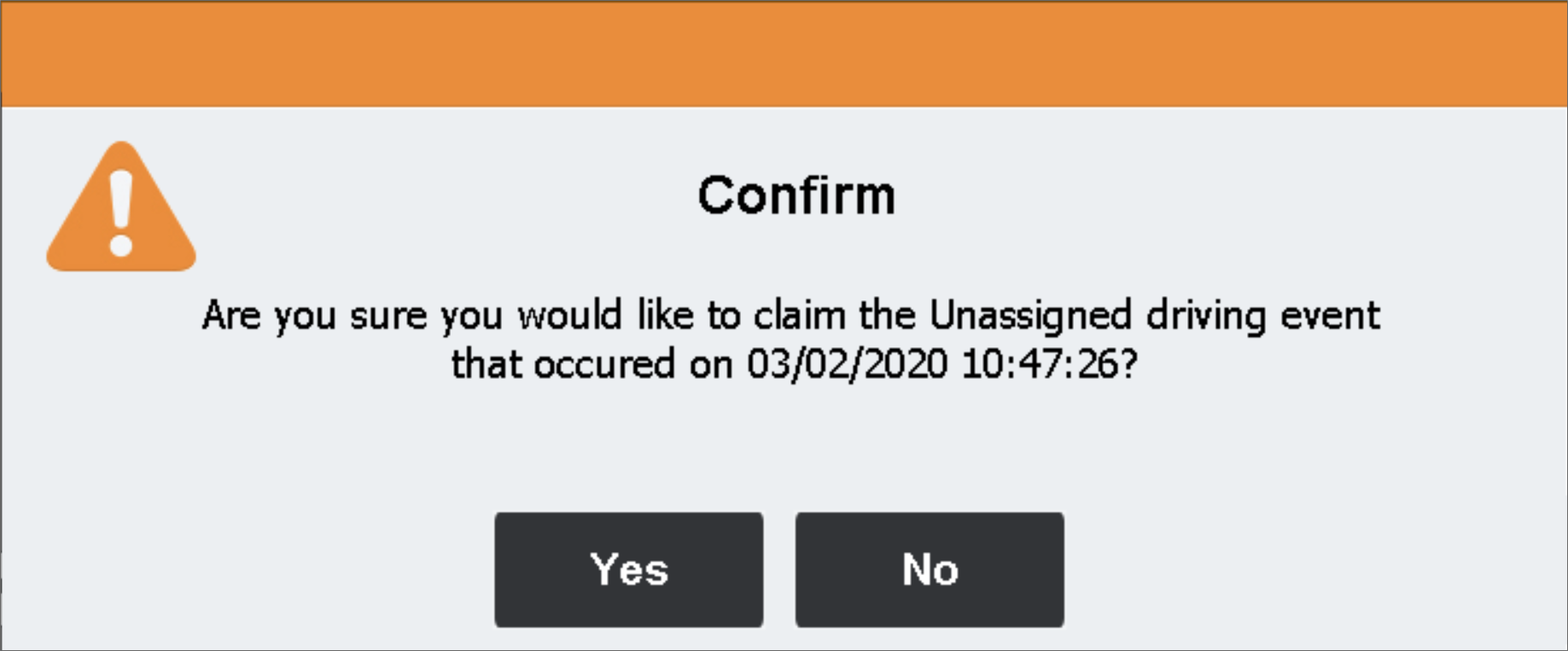
- Drivers now receive a confirmation message when they accept a UVA event. This means drivers can avoid accidentally accepting additional UVA events if they double-tap the Next button.
- Return messages sent from an MCP200 device connected to a TTID or TT210 device now include the Trailer ID sent by the TTID.
- An MCP200 device connected to a TTID or TT210 device now displays Trailer ID information in the main screen of the Trailer Tracks application. This allows the driver to see the ID of the trailer hooked up to the tractor.
New Scanner Driver
This release includes an updated scanner driver.
Fixes
| Work Item Number | Description |
|---|---|
| OHOS-37 | The pop-up message that indicates the time needed to complete the required sleeper berth reset was not updating correctly after the log was edited. This issue has been resolved. |
| OHOS-310 | Previously, the MCP used a manual VIN at start-up and an automatic VIN at shutdown. ERODS files treated the two VINs as two different vehicles, which caused problems with ERODS file transfers. This issue has been resolved; the MCP now uses the last known valid VIN from the ECM. |
| OHOS-330 | Several changes have been made to prevent missing timing compliance malfunctions. |
| OHOS-683 | The header field in some ELD logs indicated that a Compliance Malfunction had occurred when there was no compliance malfunction event on that day. This issue has been resolved. |
| OHOS-685 | On rare occasions, eRODS files were missing intermediate logs. This issue has been resolved. |
| OHOS-921 | When drivers clocked in, they did not always see the current location but the location of the current duty status. This issue has been resolved. |